
The State of Robotics – June 2020

Adi Singh
on 8 July 2020
Tags: june , robotics , ROS , thestateofrobotics
ROS, Ripple and reflections – In this month’s edition of The State of Robotics, we’ll tell you about the recently discovered Ripple vulnerability, the latest and greatest in robots reflecting nature, and a dash of news from the ROS universe.
Foxy Fitzroy released
ROS 2 Foxy Fitzroy was released on June 5 for Ubuntu 20.04. Foxy supports many under-the-covers performance and stability improvements. Two of our favorites that continue improving robot security include a ROS Node Definition Library (NoDL) and enhanced security monitoring.
NoDL defines configurations for each ROS node and how it interfaces with other nodes. By defining normal behaviors, ROS now can also enforce compliance with those behaviors, and robots can be monitored for abnormal behavior.
Foxy improves on security monitoring by enabling logging for DDS communications. Once ROS 2 security features are enabled, environment variables can be configured to log security events to a file or publish them through DDS. Now not only can you monitor operational robot behaviors, you can also monitor communications security!
This LTS release will be supported through May 2023. See Kyle Fazzari’s blog post for more information about ROS Foxy.
ROS 2 now also has a rolling release for preparing for the next stable distribution development. Rolling Ridley is continuously updated and will at times include breaking changes.
ROSCon 2020 cancelled
We’re sad to report that, due to the uncertainty surrounding COVID-19,ROSCon 2020 has been cancelled. It might be more accurate to say “postponed” given that it will still be happening in New Orleans in 2021. We’ll certainly miss all of you till then!
Getting Started with ROS
Interested in getting up-to-speed quickly with ROS? Take a look at the Ubuntu Robotics channel on Youtube. The robotics team has started publishing tutorials to get the computer professional up and running quickly with ROS.
Videos published so far cover installing ROS Dashing and ROS Foxy on a Raspberry Pi, and installing ROS in a LXD container. Expect to see more videos on simulating robots in a LXD container, and the basic principles used to create ROS 2 robots.
World MoveIt! Day
June 2 was the fifth annual World MoveIt! Day. MoveIt runs on top of ROS, and is the most common library for manipulation; making things like robot arms take actions by planning intricate joint movements.

MoveIt has also been ported to MoveIt2 to support ROS 2. This year World MoveIt day was held virtually (no surprises there). It was a day for enthusiasts at all levels to help improve MoveIt and contribute to the codebase by fixing bugs, improving documentation, and starting work on new features.
Ripple 20
On June 16, the CERT/CC released a vulnerability notice about the Treck IP stack, commonly used in embedded systems.
Codenamed “Ripple20”, this series of vulnerabilities impacts a lightweight implementation of IP commonly used in industrial control systems and medical devices, along with many other common network-enabled devices. Most vulnerabilities are related to improper memory management and can lead to denial-of-service, information disclosure, and potentially arbitrary code execution.

Yet again the announcement underscores the importance of maintaining a software update mechanism for deployed devices.
To understand a bit more about what it takes to coordinate disclosure of a widespread embedded systems vulnerability, check out Episode 80 of the Ubuntu Security Podcast where Robotics team members discuss the vulnerability with the coordinator Vijay Sarvepalli from CERT.
Robotics shapes quantum computing
We’ve heard of robot SLAM being improved by state-of-the-art quantum techniques in the past, but what about the other way around?
A recent publication in Nature demonstrated how robotics can shape the future of quantum computing. A group of scientists from the University of Sydney adapted techniques from classical estimation used in robotic navigation to improve hardware performance of quantum systems.
Their method adapts a SLAM approach to measure the performance of one qubit – the basic unit of quantum information – and use that information to estimate the reliability of nearby qubits. A sort of ‘quantum slamming’, if you will. Now there’s a term worthy of a trademark.
Robot dog up for sale
After years of viral videos and demonstrating cutting-edge development in robotic biomimicry, Boston Dynamics has finally made its yellow robot quadruped Spot available for sale. If you’ve got $75,000 to spare, you can now be the proud owner of this seriously agile robot dog.
For the time being, the contraption can only be bought for commercial and industrial use in the United States. But it remains an encouraging step in the direction of eventual general public availability.
Build a DIY quadruped at home
If you’re a hands-on person and don’t want to shell out the $75k on a Boston Dynamics’ Spot, you can 3D print and build yourself a Solo 8 robot. Conceived as a research platform, Solo 8 is an open-source robot that comes packed with multiple gaits and directions, actuated joints for jumping, as well as orientation, posture and stability recovery.
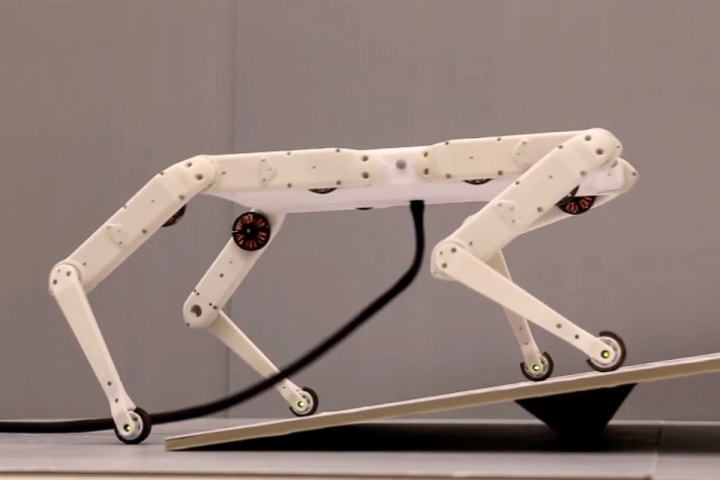
So go ahead and download the files, print the parts, buy components from the parts catalog, and put it all together to have your very own robot dog for a few thousand dollars.
Hulk smash with robot arms
Researchers from Université de Sherbrooke revealed a waist-mounted remote controlled hydraulic arm at ICRA this year.

Using magnetorheological clutches and hydrostatic transmissions, the device is supposed to mimic the performance of a human arm and assist its wearer in everyday tasks. Like painting walls, picking vegetables, handling tools, and yes, smashing through walls. Just another day in the life of a robotic limb.
Insectoid swarms for planetary exploration
Rovers and humans aren’t the only way to explore alien worlds. Swarms of insectoid robots are being studied at a number of companies and research institutions to overcome current limitations in traversing foreign terrains.

As opposed to a singular large vehicular unit, robot swarms have been demonstrated to handle complex problem solving by organizing themselves into subgroups to cooperatively chip at different aspects of a mission in parallel. They are more robust to setbacks and can recover the loss of individual members through redundancy and repurposing.
This is an exciting field, and with forward-thinking countries like Luxembourg creatingambitious initiatives around asteroid mining, we are enthusiastic about more advances in this niche in the years to come.
Outro
At Canonical we are privileged to have a well-established pattern of remote work and have been glad to help others by sharing our experience of distributed collaboration and operations. Our official commercial stance is, please lean on us, we stand ready to help.
As for all the makers and hackers out there, if you have an open-source project or initiative you’d like us to showcase in this monthly series, shoot us a message on robotics.canonical@canonical.com. We’ll take it from there. That’s it folks, stay safe in July!
Talk to us today
Interested in running Ubuntu in your organisation?
Newsletter signup
Are you building a robot on top of Ubuntu and looking for a partner? Talk to us!

Related posts
Discover your fully open source robotics observability at ROSCon 2025
Another year, another ROSCon! This year we’re heading to Singapore, and Canonical is once again thrilled to sponsor this important community event. Just like...
Canonical is now a platinum member in the Open Source Robotics Alliance
Ubuntu is the home of ROS. The very first ROS distribution, Box Turtle, launched on Ubuntu 8.04 LTS, Hardy Heron, and since then, Ubuntu and ROS have grown...
ROS Noetic is EOL – take action to maintain fleet security
As of May 2025, the Robot Operating System (ROS) Noetic Ninjemys officially reached its end of life (EOL). First released in 2020 as the final ROS (1)...