
The State of Robotics – December 2021

Gabriel Aguiar Noury
on 13 January 2022
Tags: robotics , ROS , thestateofrobotics
I will be honest, I thought that December was going to be a slow month for the robotics news. With all the holidays, I was not expecting a month with exciting announcements or events. And when I was ready to put videos of robots dancing to Christmas carols, with Christmas hats and Christmas lights, I found a month packed with great news!
So let’s dive into our monthly robotics blog and explore what the last month of 2021 brought us. And if you were looking at our 2021 robotics rewind, this is not it.
And since I already searched for Christmas videos, here you go:
Security for robotics – Log4j implications
December was a month that cybersecurity teams won’t forget. The Apache Software Foundation registered a CVE for a widely used Java logging library – Apache Log4j. A vulnerability that is easy to exploit and enables attackers to gain full control of affected servers.
Log4Shell will likely take years to remediate because of how widely the error-logging software component is used in applications and services. And while the Robot Operating System (ROS) infrastructure does not make use of Log4j, you might.
Check out this Canonical’s blog to find the instructions for applying all available fixes to your Ubuntu system today. However, note that since separate copies of Log4j packages are also often bundled directly within the applications, we recommend that teams examine each one separately to determine whether they are bundling this software and may be vulnerable by “unbundling” them.
Security for robotics – DDS vulnerabilities
If you are currently running Robot Operating System 2 (ROS 2), this piece is especially relevant from the security perspective of your robots. In December, a group of security researchers reported 13 security vulnerabilities affecting some of the most used implementations of DDS, the default middleware used by ROS 2.
Discover the risks and how to mitigate them in our latest blog.
Climbing robots – starting the year on a “higher” position
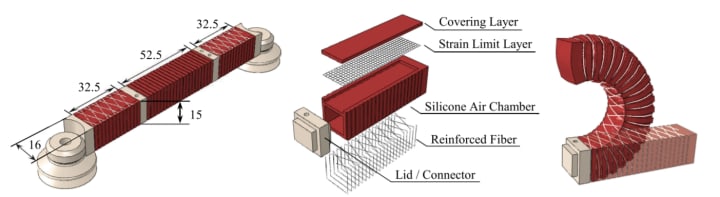
We have talked before about robots that defy gravity. They certainly inspired us, especially those designs that are already getting inspired by nature. This is the case with the robot designed by the Robotics Institute at Shanghai Jiao Tong University. This inchworm-inspired soft robot is capable of transitioning between horizontal and vertical planes.

The robot has three fibre-reinforced pneumatic actuators to control the tail, head, and body of the robot. A control system monitors the positioning of these actuators and provides a coordinated movement. This is how the robot achieves the inverted U shape seen in the picture.
And to handle higher amounts of external force and torque when suctioned to challenging surfaces, the robot employs two pressure suckers. The captured air can be pumped out, causing the suckers to become stiffer.
The pneumatic actuators and suckers work together synchronously to propel the robotic inchworm forward. It can achieve a top speed of 21 mm/s on horizontal planes and 15 mm/s on vertical walls. In terms of loads, the robot is capable of carrying 500 grams (about 15 times its own weight) on horizontal planes, or 20 g on vertical walls.
Want to learn more? Check out the full article on IEEE.
Microrobots – starting the year on a “lower” position
But we are also fans of microrobots. We featured them in our 2021 robotics rewind and we don’t miss any opportunity to feature them. Just imagine bringing the complexity of drones to a micro-scale! The soft actuators require much higher voltages than similarly-sized rigid actuators. But the featherweight robots can’t carry the necessary power electronics that would allow them to operate on their own.
In December it was MIT who brought us this new fabrication technique capable of creating low-voltage, power-dense artificial muscles that improve the performance of flying microrobots. We have seen MIT’s diminute drones, capable of zipping around with bug-like agility and resilience.

Now, this team has pioneered a fabrication technique that enables them to build soft actuators that operate with 75 per cent lower voltage than current versions while carrying 80 per cent more payload. These soft actuators are like artificial muscles that rapidly flap the robot’s wings.
So this is how it works:
- The rectangular microrobot has four sets of wings that are each driven by a soft actuator
- These muscle-like actuators are made from layers of elastomer that are sandwiched between two very thin electrodes and then rolled into a squishy cylinder
- When voltage is applied to the actuator, the electrodes squeeze the elastomer, and that mechanical strain is used to flap the wing
- The more surface area the actuator has, the less voltage is required
- The team built muscles by alternating between as many ultrathin layers of elastomer and electrode as they could
For the first time, the researchers were able to create an actuator with 20 layers, each of which is 10 micrometres in thickness (about the diameter of a red blood cell). This new fabrication technique produces artificial muscles with fewer defects, which dramatically extends the lifespan of the components and increases the robot’s performance and payload.
Robots helping us rebuild history
We all love a good robotics application, and this one marked December. Using artificial intelligence, scientists have put together a computerized system that could rebuild the magnificent murals destroyed by Mount Vesuvius. The new project could save countless hours in the reconstruction process.

Rooms filled with fragments of frescoes fractured by the eruption in 79 C.E. are now a problem for a robot. RePAIR (Reconstructing the Past: Artificial Intelligence and Robotics) is a robot that examines the fresco remnants and attempts to reassemble them. While it’s under design, the robot might employ soft humanoid arms and hands so that it can hold and scan fragile pieces without damaging them during reassembly.
The system scans the first pieces before running an algorithm for creating a virtual representation of the reconstructed model. The robot’s first task is to reconstruct the part of the Schola Armaturarum, where its members organized gladiator battles. The team has high expectations for the RePAIR robot. If successful, it could represent a major breakthrough in archaeological research.
A flying iCub
If you have worked with the robot in dynamic operations, you know that iCub spent most of its time breaking (or at least mine did). Repairing the robot was part of the experience of using it, and the reason why so many avoid it. So, when I saw that someone attached four jet engines, I couldn’t believe it.

But why? Why would you do that to one of the most expensive academic robots out there? Well, they call it aerial humanoid robotics research. Who? The researchers from the Center for Robotics and Intelligent Systems at the Italian Institute of Technology (IIT).
The study of aerial control of humanoid robots opens the door to understanding a general control framework encompassing manipulation, contact-locomotion, and flight. So keep flying high iCub, and keep surprising us in your next application.
Open source robotics – white papers
Check our latest whitepaper and learn more about Docker misconceptions and disadvantages for autonomous robots. This is for all the developers who want to make their work easier.
Open source robotics – video news
Another month, another video. More news, more applications, more robots!
And if you want to feature your robotics application, just send us an email at robotics.community@canonical.com.
Open-source robotics – tutorial
This month, we bring a masterclass from the winners of DARPA Subterranean Challenge. Team CERBERUS presents the approach and lessons learned from this exciting challenge. To learn about:
- The robotic systems legged and flying mobility concepts
- Methods for resilient multi-modal and multi-robot localization and mapping
- Autonomy and especially exploration path planning
- Artifact detection and localization on the map
- Communications and networking
Stay tuned for more robotics news
As always, we would love to learn from you. Send us a summary of your robotics innovation and project to robotics.community@canonical.com, and we will share it in our next robotics newsletter or monthly video. Thanks for reading!
Talk to us today
Interested in running Ubuntu in your organisation?
Newsletter signup
Are you building a robot on top of Ubuntu and looking for a partner? Talk to us!

Related posts
Discover your fully open source robotics observability at ROSCon 2025
Another year, another ROSCon! This year we’re heading to Singapore, and Canonical is once again thrilled to sponsor this important community event. Just like...
Canonical is now a platinum member in the Open Source Robotics Alliance
Ubuntu is the home of ROS. The very first ROS distribution, Box Turtle, launched on Ubuntu 8.04 LTS, Hardy Heron, and since then, Ubuntu and ROS have grown...
ROS Noetic is EOL – take action to maintain fleet security
As of May 2025, the Robot Operating System (ROS) Noetic Ninjemys officially reached its end of life (EOL). First released in 2020 as the final ROS (1)...